Qiang Fu
Qiang Fu
Home
Publications
Light
Dark
Automatic
Publications
January 0001
Type
Journal article
Date
2020
2019
Qiang Fu, Jialong Wang, Hongshan Yu, Islam Ali, Feng Guo, and Hong Zhang
December 2020
arXiv preprint
PL-VINS: Real-Time Monocular Visual-Inertial SLAM with Point and Line
PDF
Code
Video
Qiang Fu, Hongshan Yu, Xiaolong Wang, Zhengeng Yang, Hong Zhang, and Ajmal Mian
December 2020
arXiv preprint
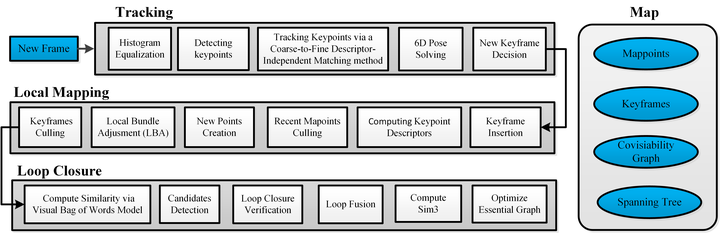
FastORB-SLAM: a Fast ORB-SLAM Method with Coarse-to-Fine Descriptor Independent Keypoint Matching
PDF
Video
Zhengeng Yang, Hongshan Yu, Qiang Fu, Wei Sun, Wenyan Jia, Mingui Sun, Zhi-Hong Mao
April 2020
IEEE Transactions on Intelligent Transportation Systems
NDNet: Narrow While Deep Network for Real-Time Semantic Segmentation
PDF
Code
Qiang Fu, Hongshan Yu, Lihai Lai, Jingwen Wang, Xia Peng, Wei Sun, Mingui Sun
December 2019
IEEE Sensor Journal
A Robust RGB-D SLAM System With Points and Lines for Low Texture Indoor Environments
PDF
Hongshan Yu, Qiang Fu, Jian Sun, Siliang Wu, Yuming chen
June 2019
仪器仪表学报
Improved 3D-NDT Point Cloud Registration Algorithm for Indoor Mobile Robot
PDF
Hongshan Yu, Qiang Fu, Zhengeng Yang, Lei Tan, Wei Sun, Mingui Sun
March 2019
IEEE Sensor Journal
Robust Robot Pose Estimation for Challenging Scenes With an RGB-D Camera
PDF
Cite
×